Peak Servo Current Tests
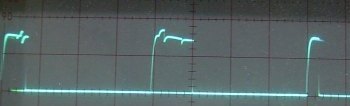
When a servo makes small movements it draws a higher peak current than when moving a larger distance.
Why? When the servo motor is stationary, only its (low) armature resistance limits current flow. Once
the motor starts turning it generates a voltage which opposes the power supply, so the effective voltage
is less and current drops.
High peak currents can temporily overload the BEC, which tries to limit current by dropping the receiver's
power supply voltage. This may cause glitching, and in extreme cases a 'smart' receiver may go into failsafe
or even 'reboot', losing control for a few seconds. To minimise the chances of this happening you should
choose servos whose combined peak currents won't exceed the current limit of your BEC. The only problem is:-
how can you find out how much peak current your servos draw?
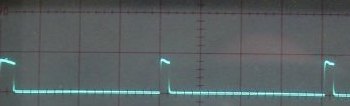
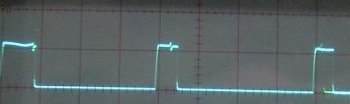
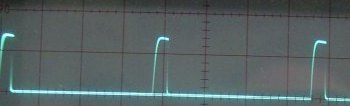
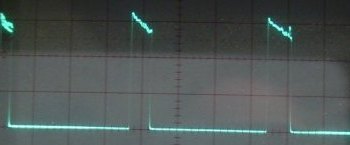
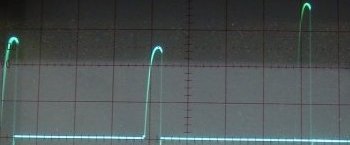
Measuring servo current with a multimeter or Wattmeter won't tell you how high the peaks get. For this you need
an oscilloscope, which traces a graph of instantaneous voltage vs. time. To convert the servo current to a voltage,
I made a current probe with a 0.1 Ohm resistor inserted in series with the servo's negative power lead. I set the
'scope input attenuator to 50mV/div, giving a display of 500mA per division. The servos were exercised with a servo
tester set for slow rotation. This simulates the small movements that typically occur in flight.
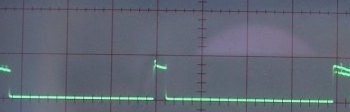
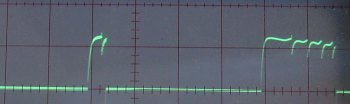
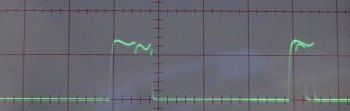
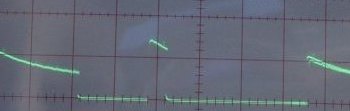
As expected, the bigger more powerful servos drew more current. However, some small servos also had suprisingly high
current peaks. The Dymond D-47 is easily the most frugal, drawing half the current of most other sub-micro servos.
Thus you can run twice as many of them without having to worry about overloading your BEC.
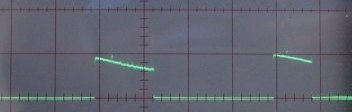
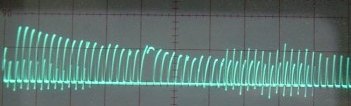
Other good ones include the HS-55, HS-50, GWS Pico and HS-56HB. The Bluebird BMS-303 also had low current draw, but
unfortunately it has 'issues'. It didn't need to be exercised because it jittered back and forth all by itself! (I
have six of these Bluebirds, and they are all bad!). The VTS-05A and HXT-900 (AKA Towerpro) have high current
draw for their size and power, but this is not suprising considering their low price (Yes, you really do 'get
what you pay for').
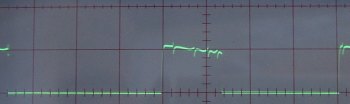
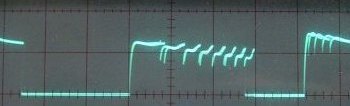
Note the distinctive waveform produced by the HS-5475HB digital servo. Here you can clearly see the high frequency PWM
motor drive, as it powers the motor almost continuously to give excellent holding torque. Analogue servos only power
the motor once per servo pulse (~50 times per second), so they tend to buzz and lose position under high loading.
| Dymond D47 (250mA) | Hitec HS-55 (400mA) |
 |  |
| | |
| Hitec HS-50 (450mA) | Bluebird BMS-303 (500mA) |
 |  |
| | |
| GWS Pico Std (550mA) | Hitec HS-56HB (550mA) |
 |  |
| | |
| GWS Naro Std (600mA) | Esky EK2-0500 (600mA) |
 |  |
| | |
| Hitec HS-65HB (650mA) | Vigor VTS-05A (700mA) |
 |  |
| | |
| Hitec HS-81 (700mA) | HXT-900 (750mA) |
 |  |
| | |
| Hitec HS-5475HB (800mA) | Hitec HS-125MG (850mA) |
 |  |
| | |
| Hitec HS-925MG (1700mA) | Hitec HS-705MG (1800mA) |
 |  |
[Home] [Test Data]